이 페이지에서는 야코비 행렬이 무엇인지, 그리고 예를 사용하여 이를 계산하는 방법을 확인할 수 있습니다. 또한, 연습할 수 있도록 야코비 행렬에 대한 몇 가지 해결된 연습 문제도 있습니다. 또한 야코비안 행렬의 행렬식인 야코비안이 왜 그렇게 중요한지 알게 될 것입니다. 마지막으로, 이 매트릭스가 다른 작업 및 애플리케이션과 유지하는 관계를 설명합니다.
야코비 행렬이란 무엇입니까?
야코비 행렬의 정의는 다음과 같습니다.
야코비 행렬(Jacobian Matrix)은 함수의 1차 편도함수로 구성된 행렬입니다.
따라서 야코비 행렬의 공식은 다음과 같습니다.

따라서 야코비 행렬은 항상 스칼라 함수만큼 많은 행을 갖습니다.

함수가 있고 열 수는 변수 수에 해당합니다.

한편, 이 행렬은 야코비안 미분 맵 (Jacobian Differential Map) 또는 야코비안 선형 맵(Jacobian Linear Map) 이라고도 알려져 있습니다. 실제로 J 대신 D로 표기되는 경우도 있습니다.

흥미롭게도 야코비 행렬은 수학 세계, 특히 선형 대수 분야에서 중요한 공헌을 한 19세기의 중요한 수학자이자 교수인 칼 구스타프 야코비(Carl Gustav Jacobi)의 이름을 따서 명명되었습니다.
야코비 행렬 계산의 예
야코비안 행렬의 개념을 확인한 후에는 예를 사용하여 이것이 어떻게 계산되는지 단계별로 살펴보겠습니다.
- 다음 함수의 점 (1,2)에서 야코비 행렬을 결정합니다.

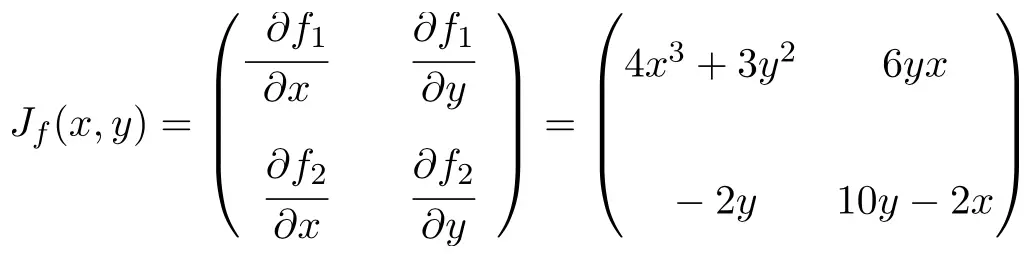
가장 먼저 해야 할 일은 함수의 모든 1차 편도함수를 계산하는 것입니다.




이제 야코비 행렬 공식을 적용해보겠습니다. 이 경우 함수에는 두 개의 변수와 두 개의 스칼라 함수가 있으므로 야코비 행렬은 2×2 차원의 정사각 행렬이 됩니다.
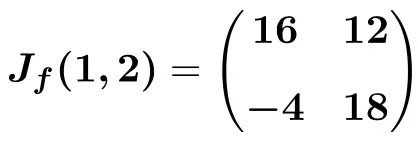
야코비 행렬에 대한 표현식이 있으면 이를 (1,2) 지점에서 평가합니다.
![\displaystyle J_f(1,2)=\begin{pmatrix} 4\cdot 1^3+3\cdot 2^2 & 6\cdot 2 \cdot 1 \\[3ex] -2\cdot 2 & 10\cdot 2-2 \cdot 1 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-fa6ed35890b94e3abe43b9a3f9674e36_l3.png "Rendered by QuickLaTeX.com")
그리고 마지막으로 작업을 수행하고 솔루션을 얻습니다.
함수의 야코비 행렬을 찾는 방법을 살펴본 후에는 연습할 수 있도록 몇 가지 연습문제를 단계별로 풀어보겠습니다.
야코비 행렬의 문제 해결
연습 1
2개의 변수에 있는 다음 벡터 함수의 점 (0,-2)에서 야코비 행렬을 찾습니다.

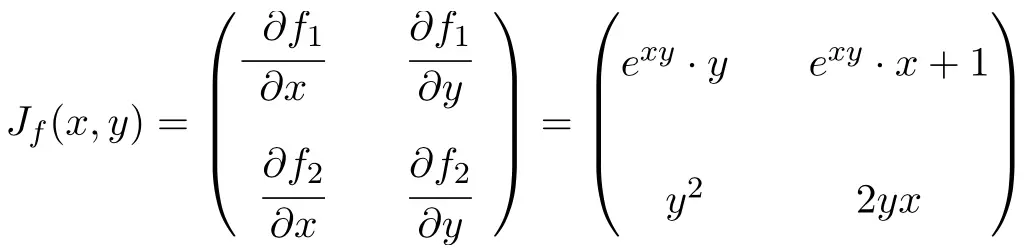
함수에는 두 개의 변수와 두 개의 스칼라 함수가 있으므로 야코비 행렬은 2×2 크기의 정사각 행렬이 됩니다.
야코비 행렬의 표현식을 계산한 후에는 (0,-2) 지점에서 이를 평가합니다.
^2 & 2\cdot (-2) \cdot 0 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-4f6008d8799a0a1c3a667e958d6c8818_l3.png "Rendered by QuickLaTeX.com")
그리고 마지막으로 작업을 수행하고 결과를 얻습니다.
![\displaystyle \bm{J_f(0,-2)}=\begin{pmatrix} \bm{-2} & \bm{1} \\[1.5ex] \bm{4} & \bm{0} \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-5eb37dc494497a424b489235b1a55a5f_l3.png "Rendered by QuickLaTeX.com")
연습 2
2개의 변수를 사용하여 다음 함수의 점 (2,-1)에서 야코비 행렬을 계산합니다.

이 경우 함수에는 두 개의 변수와 두 개의 스칼라 함수가 있으므로 야코비 행렬은 2차 정사각 행렬이 됩니다.
![\displaystyle J_f(x,y)=\begin{pmatrix}\cfrac{\phantom{5}\partial f_1}{\partial x}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial y}\phantom{5} \\[3ex] \cfrac{\partial f_2}{\partial x} & \cfrac{\partial f_2}{\partial y}\end{pmatrix} = \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}}3x^2y^2-10xy^2& 2x^3y-10x^2y \\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}} -3y^3 & 6y^5-9y^2x \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-48baf447fc5a448f30f13295f96cb874_l3.png "Rendered by QuickLaTeX.com")
야코비안 행렬에 대한 표현식을 찾으면 이를 (2,-1) 지점에서 평가합니다.
![\displaystyle J_f(2,-1)=\begin{pmatrix} 3\cdot 2^2\cdot (-1)^2-10\cdot 2 \cdot (-1)^2\phantom{5} & \phantom{5}2\cdot 2^3\cdot (-1)-10\cdot 2^2\cdot (-1) \\[4ex] -3(-1)^3 & 6\cdot (-1)^5-9\cdot (-1)^2\cdot 2 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-4f2ee2de8e72eed6956f784628353547_l3.png "Rendered by QuickLaTeX.com")
그리고 마지막으로 작업을 수행하고 결과를 얻습니다.
![\displaystyle \bm{J_f(1,2)}=\begin{pmatrix} \bm{-8} & \bm{24} \\[1.5ex] \bm{3} & \bm{-24} \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-7935318698eadf3d3af4f87e6e8f2629_l3.png "Rendered by QuickLaTeX.com")
연습 3
3개의 변수를 사용하여 다음 함수의 점 (2,-2,2)에서 야코비 행렬을 결정합니다.

이 경우 함수에는 3개의 변수와 2개의 스칼라 함수가 있으므로 야코비 행렬은 2×3 차원의 직사각형 행렬이 됩니다.
![\displaystyle J_f(x,y,z)= \begin{pmatrix}\cfrac{\phantom{5}\partial f_1}{\partial x}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial y}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial z}\phantom{5} \\[3ex] \cfrac{\partial f_2}{\partial x} & \cfrac{\partial f_2}{\partial y} &\cfrac{\partial f_2}{\partial z}\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-5b327537a2e4c80c7eb38d56d94bb141_l3.png "Rendered by QuickLaTeX.com")

야코비안 행렬에 대한 표현식을 얻은 후에는 (2,-2,2) 지점에서 이를 평가합니다.
![\displaystyle J_f(2,-2,2)= \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}}2\bigl(1+\tan^2 (2^2-(-2)^2)\bigr) \cdot 2\cdot 2 & 2\bigl(1+\tan^2 (2^2-(-2)^2)\bigr) \cdot (-2\cdot (-2)) & \tan (2^2-(-2)^2)\\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}} \displaystyle -2\ln \left( \frac{2}{2} \right) & \displaystyle 2\ln \left( \frac{2}{2} \right) &\displaystyle \frac{2\cdot (-2)}{2} \right)\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-a62dd1b4655e9d089404028ec48fbe11_l3.png "Rendered by QuickLaTeX.com")
우리는 계산을 수행합니다.
![\displaystyle J_f(2,-2,2)= \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}}2\bigl(1+\tan^2 (0)\bigr) \cdot 4 \phantom{5} & 2\bigl(1+\tan^2 (0)\bigr) \cdot 4 & \phantom{5}\tan (0)\\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}} -2\cdot 0 & 2\cdot 0 &-2 \right)\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-05c8aaa8cca0f4cb652c95b11d2e9db1_l3.png "Rendered by QuickLaTeX.com")
그리고 우리는 더 이상 단순화할 수 없을 때까지 계속 운영합니다.
![\displaystyle \bm{J_f(2,-2,2)=} \begin{pmatrix}\bm{8} & \bm{8} & \bm{0} \\[2ex] \bm{0} & \bm{0} &\bm{-2} \right)\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-d2b4fda9837a6287456ca469d46a2382_l3.png "Rendered by QuickLaTeX.com")
연습 4
점에서 야코비 행렬을 결정합니다.

다음 다변수 함수 중:

이 경우 함수에는 두 개의 변수와 세 개의 스칼라 함수가 있으므로 야코비 행렬은 3×2 차원의 직사각형 행렬이 됩니다.
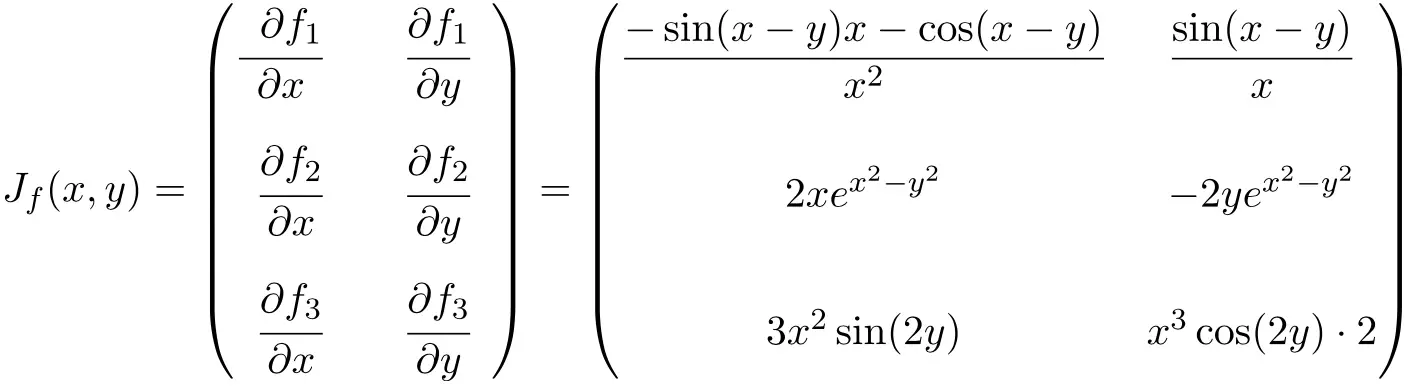
야코비 행렬에 대한 표현식을 얻은 후에는 이를 다음과 같이 평가합니다.

![\displaystyle J_f(\pi,\pi)= \begin{pmatrix} \displaystyle \vphantom{\cfrac{\partial f_3}{\partial y}}\frac{-\sin(\pi-\pi)\pi-\cos(\pi-\pi)}{\pi^2} & \displaystyle\frac{\sin (\pi- \pi)}{\pi} \\[3ex] \vphantom{\cfrac{\partial f_3}{\partial y}}2\pi e^{\pi^2-\pi^2} & -2\pi e^{\pi^2-\pi^2} \\[3ex] \vphantom{\cfrac{\partial f_3}{\partial y}} 3\pi^2\sin(2\pi) & \pi^3 \cos(2\pi)\cdot 2 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-167caa7a7d1cb34db33f7b92e21b5f78_l3.png "Rendered by QuickLaTeX.com")
우리는 다음 작업을 수행합니다.
![\displaystyle J_f(\pi,\pi)= \begin{pmatrix} \displaystyle \vphantom{\cfrac{\partial f_3}{\partial y}}\displaystyle\frac{-0-1}{\pi^2} & \displaystyle\frac{0}{\pi} \\[3ex] \vphantom{\cfrac{\partial f_3}{\partial y}}2\pi e^{0} & -2\pi e^{0} \\[3ex] \vphantom{\cfrac{\partial f_3}{\partial y}} 3\pi^2\cdot 0 & \pi^3 \cdot 1 \cdot 2 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-b05c5bfee3f874f3adec324a6bc9b43e_l3.png "Rendered by QuickLaTeX.com")
따라서 고려된 지점에서 벡터 함수의 야코비 행렬은 다음과 같은 가치가 있습니다.
![\displaystyle \bm{J_f(\pi,\pi)=} \begin{pmatrix}\displaystyle -\frac{\bm{1}}{\bm{\pi^2}} & \bm{0} \\[3ex] \bm{2\pi} & \bm{-2\pi}\\[3ex]\bm{0} & \bm{2\pi^3} \right)\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-f4addee61e4664b95dbb049be217af34_l3.png "Rendered by QuickLaTeX.com")
연습 5
해당 점에서 야코비 행렬을 계산합니다.

3개의 변수가 있는 다음 함수:

이 경우 함수는 세 개의 변수와 세 개의 스칼라 함수로 구성되므로 야코비 행렬은 3×3 차원의 정사각 행렬이 됩니다.
![\displaystyle J_f(x,y,z)=\begin{pmatrix}\phantom{5}\cfrac{\partial f_1}{\partial x}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial y}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial z}\phantom{5} \\[3ex] \cfrac{\partial f_2}{\partial x} & \cfrac{\partial f_2}{\partial y} & \cfrac{\partial f_2}{\partial z} \\[3ex] \cfrac{\partial f_3}{\partial x} & \cfrac{\partial f_3}{\partial y} & \cfrac{\partial f_3}{\partial z}\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-bfd9dcbb1d4961906d5b8581f70f5392_l3.png "Rendered by QuickLaTeX.com")
야코비 행렬을 찾으면 다음 지점에서 이를 평가합니다.

![\displaystyle J_f(3,0,\pi)= \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}} e^{2\cdot 0}\cos(-\pi) & 2\cdot 3e^{2\cdot 0}\cos(-\pi) & 3e^{2\cdot 0}\sin(-\pi) \\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}} 0 & \displaystyle 3(0-2)^2\cdot \sin\left(\frac{\pi}{2}\right) & \displaystyle\frac{1}{2}(0-2)^3\cdot \cos\left(\frac{\pi}{2}\right)\\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}}\displaystyle\frac{e^{2\cdot 0}}{3} &\displaystyle 2e^{2\cdot 0}\cdot \ln\left(\frac{3}{3}\right) & 0\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-4f56df32b7632d1e74f014f0aab2b52a_l3.png "Rendered by QuickLaTeX.com")
우리는 작업을 계산합니다.
![\displaystyle J_f(3,0,\pi)= \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}} 1\cdot (-1) & 6\cdot 1\cdot (-1) & 3\cdot 1 \cdot 0 \\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}} 0 & \displaystyle 3\cdot 4 \cdot 1 & \displaystyle\frac{1}{2}\cdot (-8)\cdot 0\\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}}\displaystyle\frac{1}{3} &\displaystyle 2\cdot 1\cdot 0 & 0\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-5771c5e1c54eabf6df6633abd5f3e194_l3.png "Rendered by QuickLaTeX.com")
그리고 해당 지점에서 야코비 행렬의 결과는 다음과 같습니다.
![\displaystyle \bm{J_f(3,0,\pi)=} \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}} \bm{-1} & \bm{-6} & \phantom{-}\bm{0} \\[2ex] \bm{0} & \bm{12} & \displaystyle \bm{0} \\[2ex] \displaystyle \frac{\bm{1}}{\bm{3}} &\bm{0}& \bm{0}\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-6dc1884b96ce985e1475c5cfcba2fff8_l3.png "Rendered by QuickLaTeX.com")
야코비 행렬의 행렬식: 야코비 행렬
야코비안 행렬의 행렬식을 야코비안 행렬식(Jacobian determinant) 또는 야코비안(Jacobian)이라고 합니다. 함수에 스칼라 함수와 동일한 수의 변수가 있는 경우에만 야코비 행렬을 계산할 수 있다는 점을 고려해야 합니다. 왜냐하면 야코비 행렬은 열과 동일한 수의 행을 가지므로 정사각형이 되기 때문입니다. 행렬. .
야코비안의 예
두 개의 변수가 있는 함수의 야코비 행렬식을 계산하는 예를 살펴보겠습니다.

먼저 함수의 야코비안 행렬을 계산합니다.
![\displaystyle J_f(x,y)=\begin{pmatrix}\cfrac{\phantom{5}\partial f_1}{\partial x}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial y}\phantom{5} \\[3ex] \cfrac{\partial f_2}{\partial x} & \cfrac{\partial f_2}{\partial y}\end{pmatrix} = \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}}2x \phantom{5}& -2y \\[2ex] \vphantom{\cfrac{\partial f_2}{\partial x}} 2y & 2x \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-5870e75f368ea3e554b2fa32cfa554dc_l3.png "Rendered by QuickLaTeX.com")
이제 우리는 2×2 행렬의 행렬식을 푼다:
![\displaystyle \text{det}\bigl(J_f(x,y)\bigr) =\begin{vmatrix} 2x&-2y \\[2ex] 2y & 2x \end{vmatrix} = \bm{4x^2+4y^2}](https://mathority.org/wp-content/ql-cache/quicklatex.com-6d1ef9df1d4735e3cea235c653714439_l3.png "Rendered by QuickLaTeX.com")
야코비 행렬과 함수의 가역성
이제 야코비 행렬의 개념을 보았으므로 아마도… 요점이 무엇인가?라고 생각했을 것입니다.
음, 야코비 행렬의 주요 용도는 함수가 역전될 수 있는지 여부를 결정하는 것입니다. 역함수 정리 에 따르면 야코비 행렬(야코비 행렬)의 행렬식은 0과 다르면 이 함수가 가역적임을 의미합니다.

이 조건은 필요하지만 충분하지는 않다는 점에 유의해야 합니다. 즉, 행렬식이 0이 아니면 행렬이 반전될 수 있다고 주장할 수 있지만, 행렬식이 0이면 우리는 행렬식이 역전될 수 있다고 주장할 수 있습니다. 함수에는 역수 또는 No가 있습니다.
예를 들어, 함수의 야코비 행렬을 찾는 방법에 대해 이전에 본 예에서 행렬식은 다음을 제공합니다.

. 이 경우 우리는 함수가 점 (0,0)을 제외하고는 항상 역전될 수 있다고 주장할 수 있습니다. 왜냐하면 이 점은 야코비 행렬식이 0과 같은 유일한 점이므로 역함수인지 알 수 없기 때문입니다. 이 지점에 존재합니다.
야코비 행렬과 다른 연산의 관계
야코비 행렬은 함수의 기울기 및 헤세 행렬과 관련이 있습니다.
경사
함수가 스칼라 함수인 경우 야코비 행렬은 기울기 와 동일한 행 행렬이 됩니다.


헤세 행렬
함수 기울기의 야코비 행렬은 헤세 행렬 과 같습니다.

헤세 행렬은 함수의 2차 도함수로 구성되기 때문에 둘 이상의 변수를 갖는 함수를 도출하는 데 매우 중요한 행렬입니다. 실제로 헤세 행렬은 야코비안 행렬의 연속성이라고 말할 수 있습니다. 하지만 이는 매우 중요하므로 이를 자세히 설명하는 전체 페이지가 있습니다. 따라서 이 행렬이 정확히 무엇인지, 왜 그렇게 특별한지 알고 싶다면 링크를 클릭하면 됩니다.
야코비 행렬의 응용
함수가 가역인지 여부를 결정하는 야코비 행렬의 유용성 외에도 야코비 행렬에는 다른 용도도 있습니다.
야코비 행렬(Jacobian Matrix)은 다변량 함수의 임계점을 계산하는 데 사용되며, 이를 헤시안 행렬(Hessian Matrix)을 통해 최대값, 최소값 또는 안장점으로 분류합니다. 임계점을 찾으려면 함수의 야코비 행렬을 계산하고 이를 0으로 설정한 후 결과 방정식을 풀어야 합니다.

추가적으로, 야코비 행렬의 또 다른 적용은 두 개 이상의 변수를 갖는 함수의 적분, 즉 이중 적분, 삼중 적분 등에서 발견됩니다. 야코비 행렬의 행렬식은 다음 공식에 따라 다중 적분에서 변수의 변경을 허용하므로:


여기서 T는 원래 변수를 새 변수와 연결하는 변수 변경 함수입니다.
마지막으로 야코비 행렬은 모든 함수의 선형 근사를 만드는 데에도 사용됩니다.

한 지점 주변

:
