このページには、計画内のすべての方程式の式とその計算方法が記載されています。また、法線ベクトルを使用して平面の方程式を見つける方法も学びます。さらに、計画の方程式の例を確認したり、解いた演習で練習したりすることができます。
平面の方程式は何ですか?
解析幾何学において、平面の方程式は、任意の平面を数学的に表現できる方程式です。したがって、平面の方程式を見つけるには、1 つの点と、その平面に属する 2 つの線形に独立したベクトルのみが必要です。
平面方程式の説明を続ける前に、平面(幾何)とは何かを理解しておくことが重要です。そうしないと理解できない部分が出てきます。よくわからない場合は、このリンクで確認してください。プランについて知っておくべきことはすべてここにまとめられています。
計画の方程式は何ですか?
平面の方程式の定義で見たように、平面上の任意の点は、1 つの点と 2 つのベクトルの線形結合として表現できます。
ただし、方程式が平面に対応するために必要な条件は、平面の 2 つのベクトルが線形独立性を持つこと、つまり 2 つのベクトルが互いに平行にならないことです。
したがって、平面のすべてのタイプの方程式は、平面のベクトル方程式、パラメトリック方程式、陰的 (または一般) 方程式、および正準 (または部分) 方程式です。
次に、計画のすべての方程式の説明と公式を詳しく見ていきます。
平面のベクトル方程式
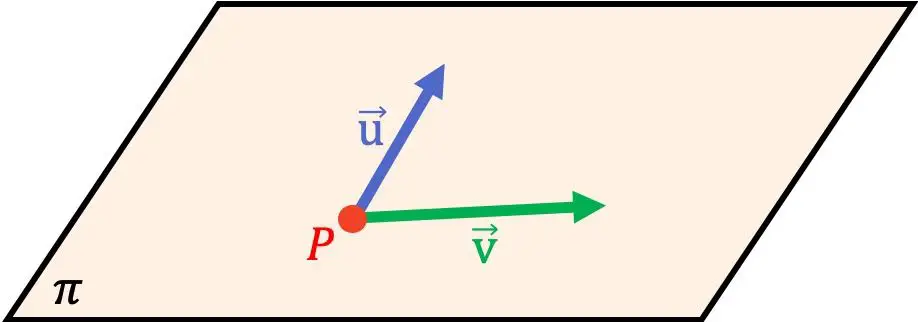
点と平面の 2 つの方向ベクトルを考えてみましょう。
![\begin{array}{c} P(P_x,P_y,P_z) \\[2ex] \vv{\text{u}}=(\text{u}_x,\text{u}_y,\text{u}_z)\\[2ex] \vv{\text{v}}=(\text{v}_x,\text{v}_y,\text{v}_z)\end{array}](https://mathority.org/wp-content/ql-cache/quicklatex.com-cf5d4130501bb01b15aa80f8f80caf1a_l3.png "Rendered by QuickLaTeX.com")
平面のベクトル方程式の公式は次のとおりです。
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} (x,y,z)=P+\lambda \vv{\text{u}} + \mu \vv{\text{v}} \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-d9227901692832cb0c176a896d35e896_l3.png "Rendered by QuickLaTeX.com")
または同等のもの:

金

そして

は 2 つのスカラー、つまり 2 つの実数です。
平面のパラメトリック方程式
平面のパラメトリック方程式は、そのベクトル方程式から決定できます。以下でデモをご覧いただけます。
任意の平面のベクトル方程式を次のようにします。
まずベクトルとスカラーの積を演算して実行します。

次に、コンポーネントを追加します。

そして最後に、各変数に対応する座標を個別に同化することで、計画のパラメトリック方程式を取得します。
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} \displaystyle \begin{cases}x=P_x + \lambda \text{u}_x + \mu \text{v}_x \\[1.7ex] y=P_y + \lambda \text{u}_y + \mu \text{v}_y\\[1.7ex] z=P_z + \lambda\text{u}_z + \mu \text{v}_z \end{cases} \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-e1791802331aa9973126b3d7c7f1b716_l3.png "Rendered by QuickLaTeX.com")
金:
-
そして
は 2 つのスカラー、つまり 2 つの実数です。
-

計画の 2 つの誘導ベクトルのうちの 1 つのコンポーネントです

-

計画の他の方向ベクトルの構成要素です

平面の暗黙的または一般方程式
点と平面の 2 つの方向ベクトルを考えてみましょう。
平面の陰的な一般方程式またはデカルト方程式は、次の行列式を解き、結果を 0 に設定することによって取得されます。
![\displaystyle \begin{vmatrix}\text{u}_x & \text{v}_x & x-P_x \\[1.1ex]\text{u}_y & \text{v}_y & y-P_y \\[1.1ex]\text{u}_z & \text{v}_z & z-P_z \end{vmatrix} = 0](https://mathority.org/wp-content/ql-cache/quicklatex.com-68d67612dfa54d76666aa37b702a472f_l3.png "Rendered by QuickLaTeX.com")
したがって、結果として得られる計画の暗黙的な方程式または一般方程式は次のようになります。
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} \displaystyle Ax+By+Cz+D=0 \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-7dcacf16123986ecd33dace4f4411914_l3.png "Rendered by QuickLaTeX.com")
このタイプの平面方程式は、デカルト平面方程式とも呼ばれます。
平面の正準方程式または部分方程式
平面の正準方程式または部分方程式の式は次のとおりです。
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} \displaystyle \cfrac{x}{a}+\cfrac{y}{b} + \cfrac{z}{c} = 1 \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-7c19853d465a703aa398bde04fa3222c_l3.png "Rendered by QuickLaTeX.com")
金:
-

は平面と X 軸の交点です。
-

は平面と Y 軸の交点です。
-

これは、平面が Z 軸と交差する場所です。
平面の正準方程式 (または部分方程式) は、その一般方程式から取得することもできます。

まず、次の方程式から係数 D を解きます。

次に、計画の方程式全体をパラメーター D の値で除算し、符号を変更します。


そして、分数の性質を利用すると、次の式が得られます。

したがって、この式から、平面の正準方程式または部分方程式の項を直接計算できる式を導き出します。

したがって、計画の方程式のこの変形を形成できるようにするには、係数 A、B、および C がゼロ以外でなければならず、これにより分数の不確定性が回避されます。
法線ベクトルから平面の方程式を計算する方法
平面の方程式における非常に典型的な問題は、点とその法線 (または垂直) ベクトルを考慮して、特定の平面の方程式がどのように見えるかを見つけることです。それでは、どのように機能するかを見てみましょう。
ただし、平面に垂直なベクトルの成分 X、Y、Z がそれぞれ、当該平面の陰的な (または一般的な) 方程式の係数 A、B、C と一致することを最初に知っておく必要があります。

金

平面に直交するベクトルです

前の関係がわかったら、このタイプの平面方程式の問題を解く例を見てみましょう。
- 点を通過する平面の陰的な方程式または一般方程式を決定します。

その法線ベクトルの 1 つは、

平面の陰的な一般方程式またはデカルト方程式の式は次のとおりです。
したがって、法線ベクトルから係数 A、B、C を見つけることができます。これらは法線ベクトルの成分に等しいためです。

パラメーター D を見つける必要があるだけです。これを行うには、平面に属する点の座標を方程式に代入します。




したがって、計画の暗黙的または一般方程式は次のようになります。

平面方程式の問題を解決しました
演習 1
ベクトルを含む平面のベクトル方程式を決定します。

そして次の 2 つのポイントを通過します。

そして

平面の方程式を知るには、1 つの点と 2 つのベクトルが必要ですが、この場合はベクトルが 1 つしかないため、平面の別の方向ベクトルを見つける必要があります。これを行うには、平面の 2 点を定義するベクトルを計算します。

平面と点の 2 つの方向ベクトルがすでにわかっているので、平面のベクトル方程式の公式を使用します。

そして、2 つのベクトルと平面上の 2 つの点の 1 つを方程式に代入します。

演習 2
次の 3 つの点を含む平面のパラメトリック方程式を求めます。

平面のパラメトリック方程式を見つけるには、平面内でリンクする 2 つの線形独立ベクトルを見つける必要があります。そして、このために、3 つの点によって定義される 2 つのベクトルを計算できます。


見つかった 2 つのベクトルの座標は比例していないため、互いに線形独立しています。
2 つの方向ベクトルと平面上の点がすでにわかっているので、平面のパラメトリック方程式の公式を適用します。
![\displaystyle \begin{cases}x=P_x + \lambda \text{u}_x + \mu \text{v}_x \\[1.7ex] y=P_y + \lambda \text{u}_y + \mu \text{v}_y \\[1.7ex] z=P_z + \lambda\text{u}_z + \mu \text{v}_z \end{cases}](https://mathority.org/wp-content/ql-cache/quicklatex.com-f5adabb85c9285653d6b638f7c48ba50_l3.png "Rendered by QuickLaTeX.com")
そして、2 つのベクトルと平面の 3 つの点の 1 つを方程式に代入します。
![\displaystyle \begin{cases}x=4 + \lambda \cdot (-2)+ \mu \cdot (-3) \\[1.7ex] y=1 + \lambda \cdot (-4) + \mu \cdot 4 \\[1.7ex] z=0 + \lambda\cdot (-1) + \mu \cdot 3 \end{cases}](https://mathority.org/wp-content/ql-cache/quicklatex.com-f57edaf8a85108cffb796470ffca8484_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle \begin{cases}\bm{x=4 -2 \lambda-3\mu } \\[1.7ex] \bm{y=1-4 \lambda+4 \mu } \\[1.7ex] \bm{z=-\lambda + 3\mu } \end{cases}](https://mathority.org/wp-content/ql-cache/quicklatex.com-4cab5ddc074bd7df6849d71854207cf5_l3.png "Rendered by QuickLaTeX.com")
演習 3
点を通過する平面の陰的方程式または一般方程式を求めます。

ベクトルが含まれています

そして

平面の一般方程式または陰的方程式を計算するには、2 つのベクトル、3 つの変数、および点の座標によって形成される次の行列式を解く必要があります。
![\displaystyle\begin{vmatrix}\text{u}_x & \text{v}_x & x-P_x \\[1.1ex]\text{u}_y & \text{v}_y & y-P_y \\[1.1ex]\text{u}_z & \text{v}_z & z-P_z \end{vmatrix} =0](https://mathority.org/wp-content/ql-cache/quicklatex.com-917f1770ff2a17897e5df76998ec3519_l3.png "Rendered by QuickLaTeX.com")
したがって、ベクトルと点を式に代入します。
![\displaystyle\begin{vmatrix}4 & 5 & x+2 \\[1.1ex]1 & 3 & y-1 \\[1.1ex]3& 1 & z+1 \end{vmatrix} =0](https://mathority.org/wp-content/ql-cache/quicklatex.com-02e103601cd9992a8a8c087d016a08c1_l3.png "Rendered by QuickLaTeX.com")
次に、選択した方法で 3×3 行列の行列式を解きます。

最後に、操作を実行して、類似した用語をグループ化します。



したがって、計画の暗黙的または一般方程式は次のようになります。

演習 4
ポイントかどうかを判断する

以下のプランに属します。

点が平面上にあるためには、その方程式を検証する必要があります。したがって、点のデカルト座標を平面の方程式に代入し、方程式が満たされるかどうかを確認する必要があります。




点は平面の方程式を尊重しないため、この平面の一部ではありません。
演習 5
一般 (または暗黙の) 方程式が次のような平面の部分方程式を求めます。

まず、方程式から独立項を削除します。

次に、計画の方程式全体を係数 D の値で除算し、符号を変更します。


そして、分数の性質を利用すると、次の式が得られます。

したがって、平面の部分 (または標準) 方程式は次のようになります。

演習 6
点を通過する空間内の平面の陰的方程式または一般方程式を計算します。

その法線ベクトルの 1 つは、

平面の陰的な一般方程式またはデカルト方程式の式は次のとおりです。
さて、法線ベクトルから係数 A、B、C を見つけることができます。これらはそれぞれ法線ベクトルの成分に等しいためです。

したがって、パラメーター D を見つけるだけで済みます。これを行うには、平面に属する点の座標を方程式に代入します。




結論として、計画の暗黙的または一般方程式は次のようになります。

演習 7
直線を含む平面のパラメトリック方程式を求めます。

そして右側に平行です

次の行になります:
![\displaystyle r: \ \begin{cases} x=1+t \\[1.7ex] y=2-3t\\[1.7ex] z=4+2t \end{cases} \qquad \qquad s: \ \frac{x-4}{2} = \frac{y+3}{2}= \frac{z-2}{-3}](https://mathority.org/wp-content/ql-cache/quicklatex.com-624f315685b292c4bb05e9cb4b931a97_l3.png "Rendered by QuickLaTeX.com")
平面のパラメトリック方程式を見つけるには、2 つの方向ベクトルと平面上の点を知る必要があります。宣言には次の行が含まれていることがわかります。
したがって、方向ベクトルとこの線上の点を取得して平面を定義できます。さらに、このステートメントは、平面が直線に平行であることを示しています。

したがって、この直線の方向ベクトルを平面方程式に使用することもできます。
権利
はパラメトリック方程式の形式で表現されるため、その方向ベクトルの成分はパラメータ項の係数になります。


そして、これと同じ線上の点のデカルト座標は、パラメトリック方程式の独立項です。

一方、直線は、

は連続方程式の形式であり、その方向ベクトルの成分が分数の分母になります。

したがって、計画のパラメトリック方程式は次のようになります。
![\displaystyle \begin{cases}x=1 + \lambda \cdot 1+ \mu \cdot 2 \\[1.7ex] y=2 + \lambda \cdot (-3) + \mu \cdot 2 \\[1.7ex] z=4 + \lambda\cdot 2 + \mu \cdot (-3) \end{cases}](https://mathority.org/wp-content/ql-cache/quicklatex.com-c81f4d8e5aa907f111b3389d5137736e_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle \begin{cases}\bm{x=1 + \lambda+2\mu } \\[1.7ex] \bm{y=2-3 \lambda+2 \mu } \\[1.7ex] \bm{z=4+2\lambda -3\mu } \end{cases}](https://mathority.org/wp-content/ql-cache/quicklatex.com-fccd86ac9a3e4084e324d8e5b1071e59_l3.png "Rendered by QuickLaTeX.com")