Vous trouverez ici les formules de tous les types d’équations de la droite. De plus, vous pourrez voir des exemples de la façon dont ils sont calculés et, en plus, pratiquer avec des exercices résolus des équations de la ligne.
Quelles sont toutes les équations de la droite ?
Rappelez-vous que la définition mathématique d’une ligne est un ensemble de points consécutifs qui sont représentés dans la même direction sans courbes ni angles.
Ainsi, pour exprimer analytiquement toute droite dans le plan (dans R2) on utilise les équations de la droite, et pour les trouver il suffit d’un point appartenant à la droite et du vecteur directeur de ladite droite. Avec seulement ces deux éléments géométriques, vous pouvez trouver absolument toutes les différentes équations de la ligne, qui sont les suivantes :
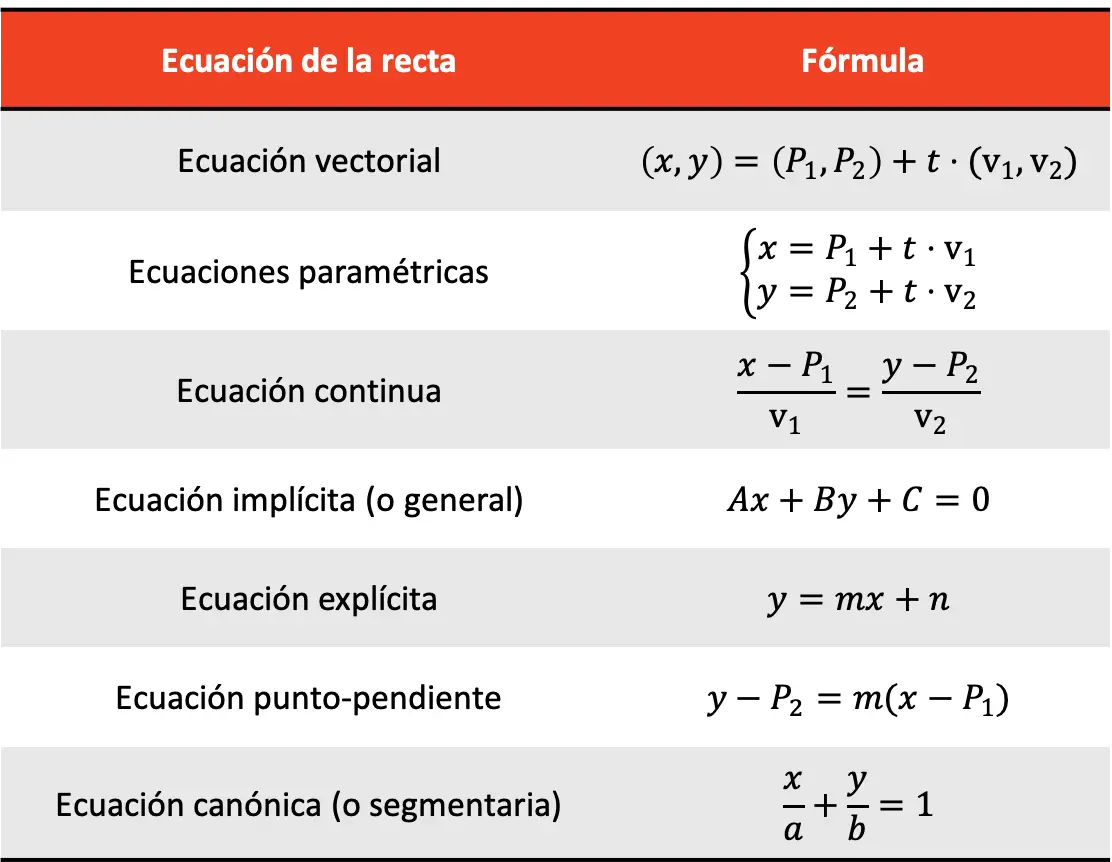
Les équations de la droite sont l’équation vectorielle, les équations paramétriques, l’équation continue, l’équation implicite (ou générale), l’équation explicite, l’équation point-pente et l’équation canonique (ou segmentaire).
Tous les types d’équations de ligne ont le même objectif : représenter mathématiquement une ligne. Mais chaque équation de la droite a ses propriétés et donc, selon le problème, il vaut mieux utiliser l’une ou l’autre.
Une fois que nous avons vu le concept des équations de la droite, nous passons maintenant à l’analyse des caractéristiques de chaque type d’équation de la droite en particulier. Ci-dessous, vous avez une explication détaillée des différents types d’équations de la ligne, mais si vous le souhaitez, vous pouvez aller directement à la fin du tableau récapitulatif avec les formules de toutes les équations de la ligne .
Équation vectorielle de la droite
Ouais
 est le vecteur directeur de la droite et
est le vecteur directeur de la droite et un point qui appartient à la droite :
un point qui appartient à la droite :

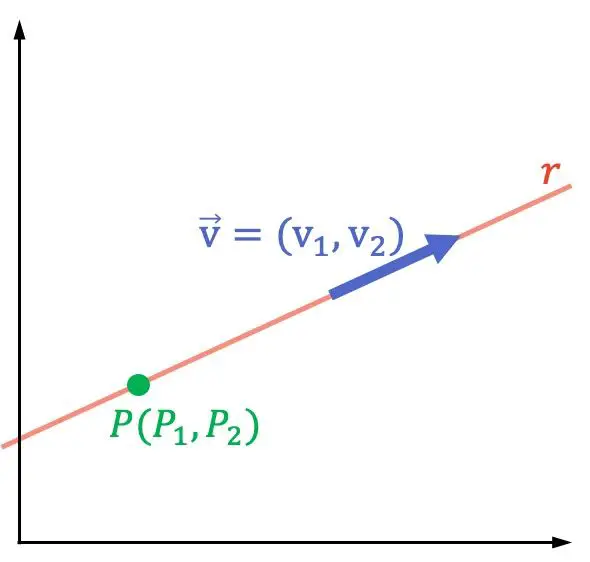
La formule de l’équation vectorielle de la droite est :
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} (x,y)=(P_1,P_2)+t\cdot (\text{v}_1,\text{v}_2) \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-f6e64023d7dbfb100dc641c09e202e2e_l3.png "Rendered by QuickLaTeX.com")
Où:
 et
et sont les coordonnées cartésiennes de tout point de la ligne.
sont les coordonnées cartésiennes de tout point de la ligne. et
et sont les coordonnées d’un point connu faisant partie de la ligne
sont les coordonnées d’un point connu faisant partie de la ligne
 et
et sont les composantes du vecteur directeur de la droite
sont les composantes du vecteur directeur de la droite
 est un scalaire (un nombre réel) dont la valeur dépend de chaque point de la droite.
est un scalaire (un nombre réel) dont la valeur dépend de chaque point de la droite.
C’est l’équation vectorielle de la droite dans le plan, c’est-à-dire lorsque l’on travaille avec des points et des vecteurs de 2 coordonnées (dans R2). Cependant, si nous faisions des calculs dans l’espace (en R3), nous devrions ajouter un composant supplémentaire à l’équation de la droite :

Équations paramétriques de la ligne
Les équations paramétriques d’une ligne peuvent être obtenues à partir de son équation vectorielle :

On multiplie d’abord le paramètre
par le vecteur directeur de la droite :

Ensuite, nous ajoutons les coordonnées X et Y :

Et, enfin, en effaçant chaque variable séparément, nous obtenons les équations paramétriques de la ligne :
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} \displaystyle \begin{cases} x=P_1+t\cdot\text{v}_1 \\[1.7ex] y=P_2+t\cdot\text{v}_2 \end{cases} \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-46f6cdd4b1d1a92d038d140904abd119_l3.png "Rendered by QuickLaTeX.com")
Où:
- et sont les coordonnées cartésiennes de tout point de la ligne.
- et sont les coordonnées d’un point connu faisant partie de la ligne
- et sont les composantes du vecteur directeur de la droite
- est un scalaire (un nombre réel) dont la valeur dépend de chaque point de la droite.
Comme précédemment, ce sont les équations paramétriques de la droite dans le plan (dans R2), mais pour trouver les équations paramétriques de la droite dans l’espace (dans R3) il faudrait ajouter une équation de plus pour la troisième variable Z :
![\displaystyle \begin{cases} x=P_1+t\cdot\text{v}_1 \\[1.7ex] y=P_2+t\cdot\text{v}_2 \\[1.7ex] z=P_3+t\cdot\text{v}_3\end{cases}](https://mathority.org/wp-content/ql-cache/quicklatex.com-e31f05449ce57a8af9ae4dda38535013_l3.png "Rendered by QuickLaTeX.com")
Equation continue de la droite
L’équation continue de toute droite peut être déduite de ses équations paramétriques :
![\displaystyle \begin{cases} x=P_1+t\cdot\text{v}_1 \\[1.7ex] y=P_2+t\cdot\text{v}_2 \end{cases}](https://mathority.org/wp-content/ql-cache/quicklatex.com-708dbb33878e2bab0dcc94c84f6ab670_l3.png "Rendered by QuickLaTeX.com")
Si nous effaçons le paramètre
à partir de chaque équation paramétrique on obtient les expressions suivantes :


E En égalant les deux équations résultantes, nous obtenons l’équation continue de la droite :


En bref, l’ équation continue de la droite est :
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} \cfrac{x-P_1}{\text{v}_1}=\cfrac{y-P_2}{\text{v}_2} \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-7063ed965532bc4df04315115aa10bdf_l3.png "Rendered by QuickLaTeX.com")
Où:
- et sont les coordonnées cartésiennes de tout point de la ligne.
- et sont les coordonnées d’un point connu faisant partie de la ligne
- et sont les composantes du vecteur directeur de la droite
Cette formule est pour l’équation continue de la droite quand on travaille en 2 dimensions (en 2D). Mais si nous effectuions des opérations en 3 dimensions (3D), nous devrions ajouter un composant supplémentaire à l’équation de la ligne :

Équation implicite ou générale de la droite
Ouais
est le vecteur directeur de la droite et un point qui appartient à la droite :
La formule de l’ équation implicite, générale ou cartésienne de la droite est :
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} Ax+By+C=0 \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-acd74645ce35f9b771269d09bb1e0b9b_l3.png "Rendered by QuickLaTeX.com")
Où:
- et sont les coordonnées cartésiennes de tout point de la ligne.
- le coefficient
 est la seconde composante du vecteur directeur de la droite :
est la seconde composante du vecteur directeur de la droite :
- le coefficient
 est la première composante du vecteur de direction changé de signe :
est la première composante du vecteur de direction changé de signe :
- le coefficient
 est calculé en remplaçant le point connu dans l’équation de la droite.
est calculé en remplaçant le point connu dans l’équation de la droite.
Outre la formule, l’équation implicite d’une droite peut également être obtenue en multipliant les fractions de l’équation continue.
Équation explicite de la droite
La formule de l’ équation explicite de la droite est :
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} y=mx+n \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-70bd24576c0a37b64c5731799e67083e_l3.png "Rendered by QuickLaTeX.com")
Où:
 est la pente de la droite.
est la pente de la droite. son ordonnée à l’origine, c’est-à-dire la hauteur à laquelle elle coupe l’axe Y.
son ordonnée à l’origine, c’est-à-dire la hauteur à laquelle elle coupe l’axe Y.
Dans la section ci-dessous, vous verrez comment les paramètres sont déterminés
et de la ligne droite Mais, en particulier, une autre façon de trouver l’équation explicite consiste à utiliser l’équation implicite ; pour cela, l’inconnu doit être résolu de l’équation implicite.
Signification des paramètres m et n
Comme nous l’avons vu dans la définition de l’équation explicite de la droite, le paramètre
est la pente de la droite et son ordonnée à l’origine. Mais qu’est ce que ça veut dire? Voyons cela à partir de la représentation graphique d’une ligne :
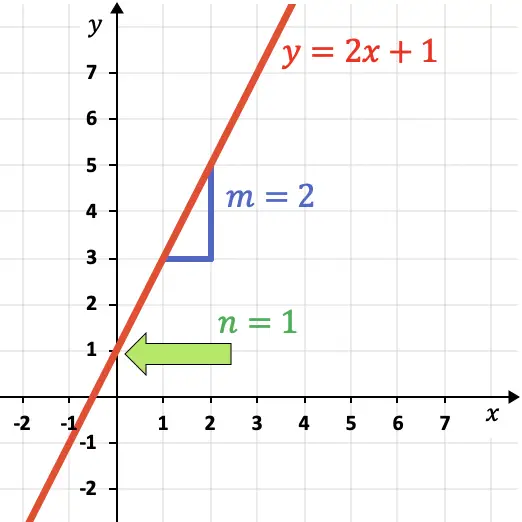
Le terme indépendant
 est le point d’intersection de la droite avec l’axe des ordonnées (axe OY). Par exemple, dans le graphique ci-dessus est égal à 1 car la droite coupe l’axe des y en y=1.
est le point d’intersection de la droite avec l’axe des ordonnées (axe OY). Par exemple, dans le graphique ci-dessus est égal à 1 car la droite coupe l’axe des y en y=1.
D’autre part, le terme
 indique la pente de la droite , c’est-à-dire son inclinaison. Comme vous le voyez sur le graphique, est égal à 2 puisque la droite s’élève de 2 unités verticales pour 1 unité horizontale.
indique la pente de la droite , c’est-à-dire son inclinaison. Comme vous le voyez sur le graphique, est égal à 2 puisque la droite s’élève de 2 unités verticales pour 1 unité horizontale.
Évidemment, si la pente est positive la fonction est croissante (monte), par contre si la pente est négative la fonction est décroissante (descend).
Calculer la pente d’une droite
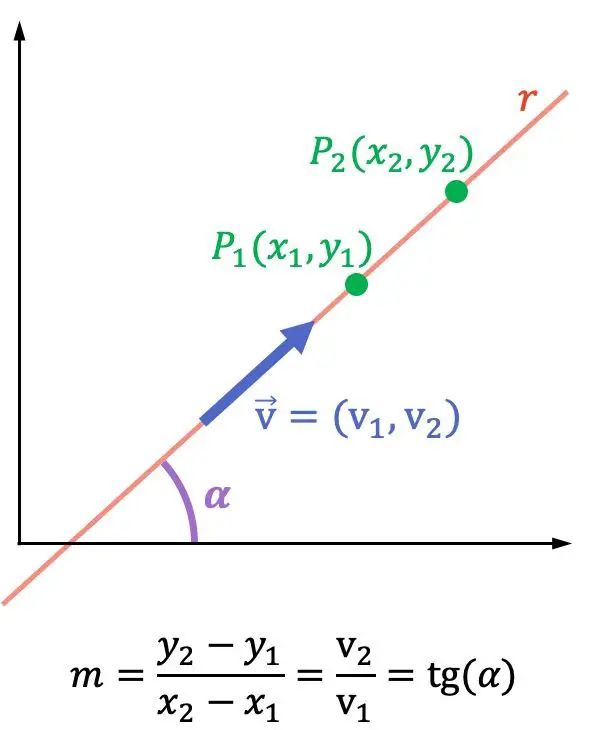
Une fois que nous savons exactement quelle est la pente d’une droite, voyons comment elle est calculée. Ainsi, il existe 3 manières différentes de déterminer numériquement la pente d’une droite :
- Étant donné deux points différents sur la ligne
 et
et La pente de la droite est égale à :
La pente de la droite est égale à : - Ouais
 est le vecteur directeur de la droite, sa pente vaut :
est le vecteur directeur de la droite, sa pente vaut : - Ouais
 est l’angle que forme la droite avec l’axe des abscisses (axe X), la pente de la droite est équivalente à la tangente dudit angle :
est l’angle que forme la droite avec l’axe des abscisses (axe X), la pente de la droite est équivalente à la tangente dudit angle :



Équation point-pente de la ligne
La formule de l’ équation point-pente de la droite est la suivante :
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} y-P_2=m(x-P_1) \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-3d1f485a8e43f9f81d8711d2f17dac20_l3.png "Rendered by QuickLaTeX.com")
Où:
- est la pente de la droite.
 sont les coordonnées d’un point sur la droite
sont les coordonnées d’un point sur la droite 
Equation canonique ou segmentaire de la droite
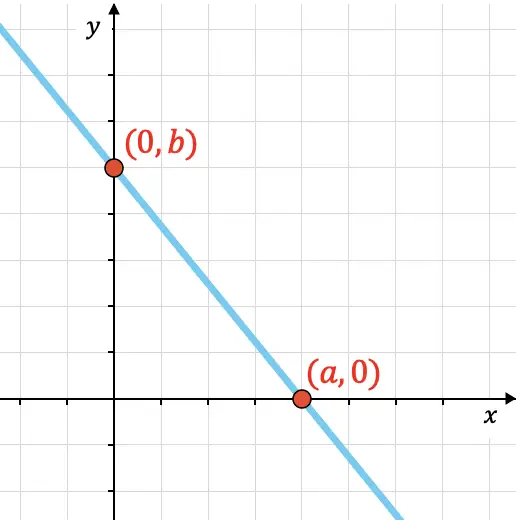
Bien que cette variante de l’équation de la droite soit moins connue, l’équation canonique de la droite peut être obtenue à partir des points d’intersection de la droite avec les axes cartésiens.
Soit les deux points d’intersection avec les axes d’une droite donnée :
Couper avec l’axe X :

Couper avec l’axe Y :

La formule de l’équation canonique de la droite est :
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} \cfrac{x}{a}+\cfrac{y}{b} = 1 \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-9f6882981d96c9f3eb383d6a005eca81_l3.png "Rendered by QuickLaTeX.com")
En mathématiques, l’équation canonique de la droite est aussi appelée équation segmentaire ou équation symétrique.
En revanche, les coefficients
 et
et On peut aussi les trouver à partir de l’équation générale de la droite par les formules suivantes :
On peut aussi les trouver à partir de l’équation générale de la droite par les formules suivantes :


Toutes les équations de la droite (formules)
En résumé, voici un tableau qui reprend les formules de toutes les équations de la droite :
Exemple de calcul des équations de la droite
Maintenant que nous avons vu toute l’explication de l’équation de la droite, voyons comment un problème typique des équations de la droite est résolu :
- Trouver toutes les équations de la droite déterminée par le point et le vecteur


Tout d’abord, on retrouve l’équation vectorielle de la droite à partir de sa formule :
Il suffit de substituer les coordonnées du point et du vecteur dans la formule :

Dans un second temps, on retrouve les équations paramétriques de la droite à travers sa formule correspondante :
![\begin{cases} x=P_1+t\cdot\text{v}_1 \\[1.7ex] y=P_2+t\cdot\text{v}_2 \end{cases}](https://mathority.org/wp-content/ql-cache/quicklatex.com-d2e6878c4d9b80337639f5fa7728a9f9_l3.png "Rendered by QuickLaTeX.com")
![\definecolor{exemple}{HTML}{2196F3} \color{exemple} \boxed{ \color{black} \quad \begin{cases} \bm{x=3+2t} \\[1.7ex] \bm{y=-1+4t} \end{cases} \quad \vphantom{\cfrac{\cfrac{1}{2}}{\cfrac{1}{2}}} }](https://mathority.org/wp-content/ql-cache/quicklatex.com-3b4690a2ab033a4016f2d16b9554ddea_l3.png "Rendered by QuickLaTeX.com")
Et nous déterminons également l’équation continue de la droite avec sa formule :


Comme vous l’avez vu, les équations vectorielles, paramétriques et continues sont faciles à calculer, il vous suffit d’utiliser leurs formules respectives.
Passons maintenant à la recherche de l’équation générale (ou implicite) de la droite. Pour ce faire, on croise les deux fractions de l’équation continue :




Maintenant, nous pouvons déterminer l’équation explicite de la ligne résolvant pour l’inconnu
de l’équation implicite :




Par conséquent, la pente de la droite est égale à 2 (terme qui accompagne la variable indépendante
).

Et avec cela, nous pouvons calculer l’équation point-pente de la ligne avec sa formule :



Enfin, pour trouver l’équation segmentaire de la droite on calcule ses points d’intersection avec les axes OX et OY puis on applique sa formule :

Point d’intersection avec l’axe des abscisses (axe X)





Point d’intersection avec l’axe des ordonnées (axe Y)






équation de droite passant par deux points
Un autre problème très courant des équations de la droite est de trouver l’équation de la droite qui est déterminée par deux points donnés. Bien que nous puissions calculer le vecteur directeur de la ligne avec les 2 points puis l’équation, nous vous fournissons ci-dessous une formule avec laquelle vous pouvez trouver directement et facilement l’équation de ladite ligne.
Soit deux points situés sur une droite :

La formule pour trouver l’équation de la droite à partir de ses 2 points est :
![\definecolor{taronjaquadreejemplo}{HTML}{FF9800} \newtcbox{\mymath}[1][]{% nobeforeafter, math upper, tcbox raise base, enhanced, colframe=taronjaquadreejemplo, boxrule=1.1pt, boxsep=2mm, #1} \begin{empheq}[box={\mymath[colback=white, shadow={2mm}{-2mm}{0mm}{taronjaquadreejemplo!20!white,} ]}]{equation*} y-y_1= \cfrac{y_2-y_1}{x_2-x_1} (x-x_1) \end{empheq}](https://mathority.org/wp-content/ql-cache/quicklatex.com-a249bd55d016ac1e7f34f42de22d6e99_l3.png "Rendered by QuickLaTeX.com")
Cette formule permet de calculer directement l’équation point-pente de la droite lorsqu’on nous donne 2 points par lesquels passe la droite.
Problèmes résolus des équations de la droite
Exercice 1
Trouvez l’équation vectorielle, les équations paramétriques et l’équation continue de la ligne définie par le point
et son vecteur directeur Être à la fois :

Tout d’abord, nous calculons l’équation vectorielle de la ligne à partir de sa formule :

On retrouve ensuite les équations paramétriques de la droite grâce à sa formule correspondante :
![\begin{cases} x=0+t\cdot (-1) \\[1.7ex] y=3+t\cdot 5\end{cases}](https://mathority.org/wp-content/ql-cache/quicklatex.com-a734c32ae40ca816c19b895e54916eb4_l3.png "Rendered by QuickLaTeX.com")
![\definecolor{exemple}{HTML}{2196F3} \color{exemple} \boxed{ \color{black} \quad \begin{cases} \bm{x=-t} \\[1.7ex] \bm{y=3+5t} \end{cases} \quad \vphantom{\cfrac{\cfrac{1}{2}}{\cfrac{1}{2}}} }](https://mathority.org/wp-content/ql-cache/quicklatex.com-bff16cf5ab85c87d8a866a2d74ea2a31_l3.png "Rendered by QuickLaTeX.com")
Et, enfin, nous déterminons l’équation continue de la droite avec sa formule respective :


Exercice 2
Trouvez l’équation implicite, l’équation explicite et l’équation point-pente de la ligne déterminée par le point
et son vecteur directeur est

La formule de l’équation implicite de la droite est :
Il faut donc trouver les coefficients A, B et C. Les inconnues A et B s’obtiennent à partir des coordonnées du vecteur directeur de la droite, car l’égalité suivante est toujours vérifiée :

Par conséquent, le coefficient A est la seconde coordonnée du vecteur, et le coefficient B est la première coordonnée du vecteur changé de signe :
![\left.\begin{array}{c}\vv{\text{v}}= (-B,A) \\[2ex] \vv{\text{v}}= (2,6) \end{array} \right\}\longrightarrow \begin{array}{l}A=6 \\[2ex] B=-2 \end{array}](https://mathority.org/wp-content/ql-cache/quicklatex.com-9357fbcba6acde824f0fa1cc3e389a0c_l3.png "Rendered by QuickLaTeX.com")
Par conséquent, nous n’avons qu’à trouver le coefficient C. Pour ce faire, nous devons substituer le point dont nous savons qu’il appartient à la droite dans son équation :





Donc l’équation implicite, générale ou cartésienne de la droite est :

Maintenant, nous pouvons déterminer l’équation explicite de la ligne résolvant pour l’inconnu
de l’équation implicite :




Par conséquent, la pente de la droite est égale à 3 (terme avant la variable indépendante
).

Et, à partir de la valeur de la pente de la droite, on peut calculer l’équation point-pente de la droite avec sa formule :


Exercice 3
Déterminez 3 points sur la droite suivante, exprimée sous forme d’équation implicite ou générale :

Pour calculer un point sur une ligne, nous devons simplement attribuer une valeur à l’une des variables, puis trouver la valeur de l’autre variable à ce point.
On calcule un premier point en faisant






On trouve alors un deuxième point donnant une autre valeur à la variable
 par exemple
par exemple 






Et, pour finir, on calcule un troisième point en résolvant







Exercice 4
Trouver toutes les équations de la droite définie par le point
et le vecteur

Tout d’abord, on retrouve l’équation vectorielle de la droite à partir de sa formule :

Dans un second temps, on retrouve les équations paramétriques de la droite à travers sa formule correspondante :
![\definecolor{exemple}{HTML}{2196F3} \color{exemple} \boxed{ \color{black} \quad \begin{cases} \bm{x=-1-3t} \\[1.7ex] \bm{y=4+6t} \end{cases} \quad \vphantom{\cfrac{\cfrac{1}{2}}{\cfrac{1}{2}}} }](https://mathority.org/wp-content/ql-cache/quicklatex.com-f3bf46da9a68147118874a619f918077_l3.png "Rendered by QuickLaTeX.com")
Et nous déterminons également l’équation continue de la droite à l’aide de sa formule :


Passons maintenant à la recherche de l’équation implicite ou générale de la droite. Pour ce faire, on croise les deux fractions de l’équation continue :




Maintenant, nous pouvons déterminer l’équation explicite de la ligne résolvant pour l’inconnu
de l’équation implicite :




Par conséquent, la pente de la droite est équivalente à -2 (terme qui accompagne la variable indépendante
).

Et avec cela, nous pouvons calculer l’équation point-pente de la ligne avec sa formule :


Enfin, pour trouver l’équation segmentaire de la droite, on calcule les points d’intersection de la droite avec les axes OX et OY puis on utilise sa formule :

Point d’intersection avec l’axe des abscisses (axe X)




Point d’intersection avec l’axe des ordonnées (axe Y)




Exercice 5
Trouver l’équation de la droite qui passe par les deux points suivants :

Puisque nous connaissons déjà deux points de la droite, nous appliquons directement la formule de l’équation de la droite à 2 points donnés :

Maintenant, nous substituons les coordonnées cartésiennes des points dans la formule :

Et, enfin, nous calculons la pente de la droite :


L’équation de la droite qui passe par ces deux points est donc :
