在此页面上,您将通过示例了解什么是雅可比矩阵以及如何计算它。此外,您还有几个已解决的雅可比矩阵练习,以便您进行练习。您还将了解为什么雅可比矩阵的行列式雅可比如此重要。最后,我们解释该矩阵与其他操作之间的关系及其应用。
什么是雅可比矩阵?
雅可比矩阵的定义如下:
雅可比矩阵是由函数的一阶偏导数构成的矩阵。
因此雅可比矩阵的公式如下:

因此,雅可比矩阵的行数始终与标量函数的行数一样多

具有该功能,并且列数将对应于变量的数量

另一方面,这个矩阵也称为雅可比微分图或雅可比线性图。事实上,有时也写成字母D而不是字母J:

出于好奇,雅可比矩阵以卡尔·古斯塔夫·雅可比 (Carl Gustav Jacobi) 的名字命名,卡尔·古斯塔夫·雅可比是一位 19 世纪重要的数学家和教授,为数学世界,特别是线性代数领域做出了重要贡献。
计算雅可比矩阵的示例
一旦我们了解了雅可比矩阵的概念,我们将通过示例逐步了解它是如何计算的:
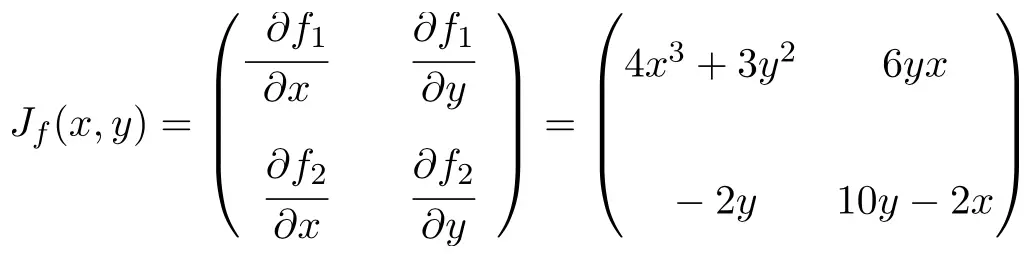
- 确定以下函数在点 (1,2) 处的雅可比矩阵:

我们需要做的第一件事是计算函数的所有一阶偏导数:




现在我们应用雅可比矩阵公式。在这种情况下,该函数有两个变量和两个标量函数,因此雅可比矩阵将是维度为 2×2 的方阵:
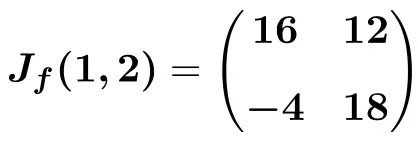
一旦我们有了雅可比矩阵的表达式,我们就在点 (1,2) 处计算它:
![\displaystyle J_f(1,2)=\begin{pmatrix} 4\cdot 1^3+3\cdot 2^2 & 6\cdot 2 \cdot 1 \\[3ex] -2\cdot 2 & 10\cdot 2-2 \cdot 1 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-fa6ed35890b94e3abe43b9a3f9674e36_l3.png "Rendered by QuickLaTeX.com")
最后,我们进行运算,得到解:
一旦您了解了如何求函数的雅可比矩阵,我们就会给您留下几个逐步解决的练习,以便您进行练习。
解决了雅可比矩阵的问题
练习1
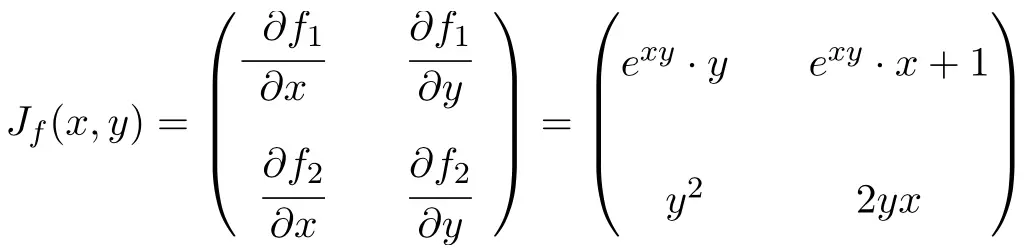
求以下 2 个变量向量函数在点 (0,-2) 处的雅可比矩阵:

该函数有两个变量和两个标量函数,因此雅可比矩阵将是大小为 2×2 的方阵:
一旦我们计算了雅可比矩阵的表达式,我们就在点 (0,-2) 处对其求值:
^2 & 2\cdot (-2) \cdot 0 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-4f6008d8799a0a1c3a667e958d6c8818_l3.png "Rendered by QuickLaTeX.com")
最后,我们进行运算并得到结果:
![\displaystyle \bm{J_f(0,-2)}=\begin{pmatrix} \bm{-2} & \bm{1} \\[1.5ex] \bm{4} & \bm{0} \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-5eb37dc494497a424b489235b1a55a5f_l3.png "Rendered by QuickLaTeX.com")
练习2
计算以下具有 2 个变量的函数在点 (2,-1) 处的雅可比矩阵:

在这种情况下,该函数有两个变量和两个标量函数,因此雅可比矩阵将是 2 阶方阵:
![\displaystyle J_f(x,y)=\begin{pmatrix}\cfrac{\phantom{5}\partial f_1}{\partial x}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial y}\phantom{5} \\[3ex] \cfrac{\partial f_2}{\partial x} & \cfrac{\partial f_2}{\partial y}\end{pmatrix} = \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}}3x^2y^2-10xy^2& 2x^3y-10x^2y \\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}} -3y^3 & 6y^5-9y^2x \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-48baf447fc5a448f30f13295f96cb874_l3.png "Rendered by QuickLaTeX.com")
一旦找到雅可比矩阵的表达式,我们就在点 (2,-1) 处对其求值:
![\displaystyle J_f(2,-1)=\begin{pmatrix} 3\cdot 2^2\cdot (-1)^2-10\cdot 2 \cdot (-1)^2\phantom{5} & \phantom{5}2\cdot 2^3\cdot (-1)-10\cdot 2^2\cdot (-1) \\[4ex] -3(-1)^3 & 6\cdot (-1)^5-9\cdot (-1)^2\cdot 2 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-4f2ee2de8e72eed6956f784628353547_l3.png "Rendered by QuickLaTeX.com")
最后,我们进行运算并得到结果:
![\displaystyle \bm{J_f(1,2)}=\begin{pmatrix} \bm{-8} & \bm{24} \\[1.5ex] \bm{3} & \bm{-24} \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-7935318698eadf3d3af4f87e6e8f2629_l3.png "Rendered by QuickLaTeX.com")
练习3
确定以下具有 3 个变量的函数在点 (2,-2,2) 处的雅可比矩阵:

在这种情况下,该函数具有三个变量和两个标量函数,因此雅可比矩阵将是一个维度为 2×3 的矩形矩阵:
![\displaystyle J_f(x,y,z)= \begin{pmatrix}\cfrac{\phantom{5}\partial f_1}{\partial x}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial y}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial z}\phantom{5} \\[3ex] \cfrac{\partial f_2}{\partial x} & \cfrac{\partial f_2}{\partial y} &\cfrac{\partial f_2}{\partial z}\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-5b327537a2e4c80c7eb38d56d94bb141_l3.png "Rendered by QuickLaTeX.com")

一旦我们有了雅可比矩阵的表达式,我们就在点 (2,-2,2) 处对其求值:
![\displaystyle J_f(2,-2,2)= \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}}2\bigl(1+\tan^2 (2^2-(-2)^2)\bigr) \cdot 2\cdot 2 & 2\bigl(1+\tan^2 (2^2-(-2)^2)\bigr) \cdot (-2\cdot (-2)) & \tan (2^2-(-2)^2)\\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}} \displaystyle -2\ln \left( \frac{2}{2} \right) & \displaystyle 2\ln \left( \frac{2}{2} \right) &\displaystyle \frac{2\cdot (-2)}{2} \right)\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-a62dd1b4655e9d089404028ec48fbe11_l3.png "Rendered by QuickLaTeX.com")
我们进行计算:
![\displaystyle J_f(2,-2,2)= \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}}2\bigl(1+\tan^2 (0)\bigr) \cdot 4 \phantom{5} & 2\bigl(1+\tan^2 (0)\bigr) \cdot 4 & \phantom{5}\tan (0)\\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}} -2\cdot 0 & 2\cdot 0 &-2 \right)\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-05c8aaa8cca0f4cb652c95b11d2e9db1_l3.png "Rendered by QuickLaTeX.com")
而我们继续运算,直到不能再简化为止:
![\displaystyle \bm{J_f(2,-2,2)=} \begin{pmatrix}\bm{8} & \bm{8} & \bm{0} \\[2ex] \bm{0} & \bm{0} &\bm{-2} \right)\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-d2b4fda9837a6287456ca469d46a2382_l3.png "Rendered by QuickLaTeX.com")
练习4
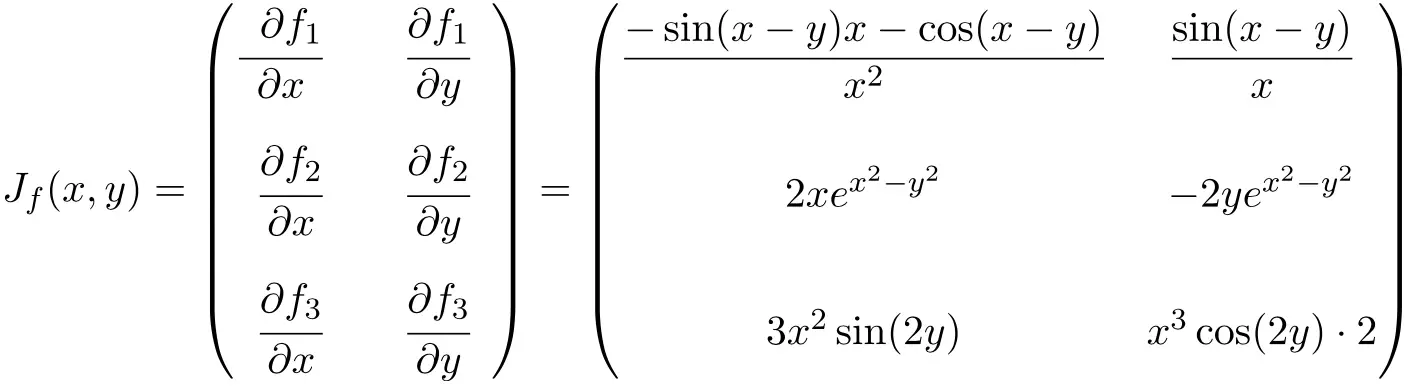
确定该点的雅可比矩阵

以下多变量函数的:

在这种情况下,该函数有两个变量和三个标量函数,因此雅可比矩阵将是一个维度为 3×2 的矩形矩阵:
一旦我们有了雅可比矩阵的表达式,我们就可以将其计算为点

![\displaystyle J_f(\pi,\pi)= \begin{pmatrix} \displaystyle \vphantom{\cfrac{\partial f_3}{\partial y}}\frac{-\sin(\pi-\pi)\pi-\cos(\pi-\pi)}{\pi^2} & \displaystyle\frac{\sin (\pi- \pi)}{\pi} \\[3ex] \vphantom{\cfrac{\partial f_3}{\partial y}}2\pi e^{\pi^2-\pi^2} & -2\pi e^{\pi^2-\pi^2} \\[3ex] \vphantom{\cfrac{\partial f_3}{\partial y}} 3\pi^2\sin(2\pi) & \pi^3 \cos(2\pi)\cdot 2 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-167caa7a7d1cb34db33f7b92e21b5f78_l3.png "Rendered by QuickLaTeX.com")
我们进行以下操作:
![\displaystyle J_f(\pi,\pi)= \begin{pmatrix} \displaystyle \vphantom{\cfrac{\partial f_3}{\partial y}}\displaystyle\frac{-0-1}{\pi^2} & \displaystyle\frac{0}{\pi} \\[3ex] \vphantom{\cfrac{\partial f_3}{\partial y}}2\pi e^{0} & -2\pi e^{0} \\[3ex] \vphantom{\cfrac{\partial f_3}{\partial y}} 3\pi^2\cdot 0 & \pi^3 \cdot 1 \cdot 2 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-b05c5bfee3f874f3adec324a6bc9b43e_l3.png "Rendered by QuickLaTeX.com")
因此,在所考虑的点处,向量函数的雅可比矩阵的值为:
![\displaystyle \bm{J_f(\pi,\pi)=} \begin{pmatrix}\displaystyle -\frac{\bm{1}}{\bm{\pi^2}} & \bm{0} \\[3ex] \bm{2\pi} & \bm{-2\pi}\\[3ex]\bm{0} & \bm{2\pi^3} \right)\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-f4addee61e4664b95dbb049be217af34_l3.png "Rendered by QuickLaTeX.com")
练习5
计算该点的雅可比矩阵

以下具有 3 个变量的函数:

在这种情况下,函数由三个变量和三个标量函数组成,因此,雅可比矩阵将是维度为 3×3 的方阵:
![\displaystyle J_f(x,y,z)=\begin{pmatrix}\phantom{5}\cfrac{\partial f_1}{\partial x}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial y}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial z}\phantom{5} \\[3ex] \cfrac{\partial f_2}{\partial x} & \cfrac{\partial f_2}{\partial y} & \cfrac{\partial f_2}{\partial z} \\[3ex] \cfrac{\partial f_3}{\partial x} & \cfrac{\partial f_3}{\partial y} & \cfrac{\partial f_3}{\partial z}\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-bfd9dcbb1d4961906d5b8581f70f5392_l3.png "Rendered by QuickLaTeX.com")
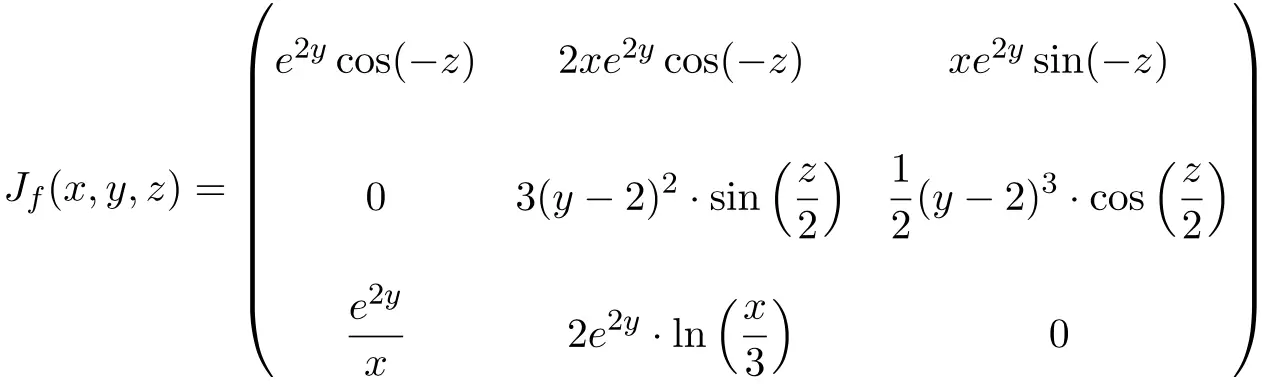
一旦我们找到了雅可比矩阵,我们就在该点对其进行评估

![\displaystyle J_f(3,0,\pi)= \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}} e^{2\cdot 0}\cos(-\pi) & 2\cdot 3e^{2\cdot 0}\cos(-\pi) & 3e^{2\cdot 0}\sin(-\pi) \\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}} 0 & \displaystyle 3(0-2)^2\cdot \sin\left(\frac{\pi}{2}\right) & \displaystyle\frac{1}{2}(0-2)^3\cdot \cos\left(\frac{\pi}{2}\right)\\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}}\displaystyle\frac{e^{2\cdot 0}}{3} &\displaystyle 2e^{2\cdot 0}\cdot \ln\left(\frac{3}{3}\right) & 0\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-4f56df32b7632d1e74f014f0aab2b52a_l3.png "Rendered by QuickLaTeX.com")
我们计算操作:
![\displaystyle J_f(3,0,\pi)= \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}} 1\cdot (-1) & 6\cdot 1\cdot (-1) & 3\cdot 1 \cdot 0 \\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}} 0 & \displaystyle 3\cdot 4 \cdot 1 & \displaystyle\frac{1}{2}\cdot (-8)\cdot 0\\[3ex] \vphantom{\cfrac{\partial f_2}{\partial x}}\displaystyle\frac{1}{3} &\displaystyle 2\cdot 1\cdot 0 & 0\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-5771c5e1c54eabf6df6633abd5f3e194_l3.png "Rendered by QuickLaTeX.com")
且该点的雅可比矩阵结果为:
![\displaystyle \bm{J_f(3,0,\pi)=} \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}} \bm{-1} & \bm{-6} & \phantom{-}\bm{0} \\[2ex] \bm{0} & \bm{12} & \displaystyle \bm{0} \\[2ex] \displaystyle \frac{\bm{1}}{\bm{3}} &\bm{0}& \bm{0}\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-6dc1884b96ce985e1475c5cfcba2fff8_l3.png "Rendered by QuickLaTeX.com")
雅可比矩阵的行列式:雅可比
雅可比矩阵的行列式称为雅可比行列式或雅可比行列式。必须考虑到,只有当函数与标量函数具有相同数量的变量时,才能计算雅可比矩阵,因为这样雅可比矩阵将具有与列数相同的行数,因此它将是一个方阵矩阵。 。
雅可比行列式的例子
让我们看一个计算具有两个变量的函数的雅可比行列式的示例:

我们首先计算函数的雅可比矩阵:
![\displaystyle J_f(x,y)=\begin{pmatrix}\cfrac{\phantom{5}\partial f_1}{\partial x}\phantom{5} & \phantom{5}\cfrac{\partial f_1}{\partial y}\phantom{5} \\[3ex] \cfrac{\partial f_2}{\partial x} & \cfrac{\partial f_2}{\partial y}\end{pmatrix} = \begin{pmatrix} \vphantom{\cfrac{\partial f_2}{\partial x}}2x \phantom{5}& -2y \\[2ex] \vphantom{\cfrac{\partial f_2}{\partial x}} 2y & 2x \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-5870e75f368ea3e554b2fa32cfa554dc_l3.png "Rendered by QuickLaTeX.com")
现在我们求解 2×2 矩阵的行列式:
![\displaystyle \text{det}\bigl(J_f(x,y)\bigr) =\begin{vmatrix} 2x&-2y \\[2ex] 2y & 2x \end{vmatrix} = \bm{4x^2+4y^2}](https://mathority.org/wp-content/ql-cache/quicklatex.com-6d1ef9df1d4735e3cea235c653714439_l3.png "Rendered by QuickLaTeX.com")
雅可比行列式和函数的可逆性
现在您已经了解了雅可比行列式的概念,您可能会想……这有什么意义呢?
那么,雅可比行列式的主要用途是确定函数是否可以反转。反函数定理指出,如果雅可比矩阵(雅可比行列式)的行列式不为 0,则意味着该函数是可逆的。

需要注意的是,这个条件是必要的,但不是充分的,也就是说,如果行列式非零,我们可以断言矩阵可以求逆,但是,如果行列式为0,我们无法知道是否函数有一个反函数或No。
例如,在前面看到的如何查找函数的雅可比行列式的示例中,行列式给出

。在这种情况下,我们可以断言除了点 (0,0) 之外,该函数总是可以反转,因为该点是唯一雅可比行列式等于 0 的点,因此,我们不知道反函数是否存在于这一点。
雅可比矩阵与其他运算的关系
雅可比矩阵与函数的梯度和Hessian矩阵有关:
坡
如果函数是标量函数,雅可比矩阵将是行矩阵,相当于梯度:


海森矩阵
函数梯度的雅可比矩阵等于海森矩阵:

Hessian 矩阵对于具有多个变量的函数的求导来说是一个非常重要的矩阵,因为它是由函数的二阶导数形成的。事实上,可以说Hessian矩阵是Jacobian矩阵的连续性。但这非常重要,我们有一个完整的页面来详细解释它。所以如果你想确切地知道这个矩阵是什么以及为什么它如此特别,你可以点击链接。
雅可比矩阵的应用
除了我们所看到的雅可比行列式(确定函数是否可逆)的有用性之外,雅可比矩阵还有其他应用。
雅可比矩阵用于计算多元函数的临界点,然后通过Hessian矩阵将其分类为最大值、最小值或鞍点。要找到临界点,您需要计算函数的雅可比矩阵,将其设置为 0,然后求解所得方程。

此外,雅可比矩阵的另一种应用是具有多个变量的函数积分,即二重、三重积分等。由于雅可比矩阵的行列式允许根据以下公式改变多个积分中的变量:


其中 T 是将原始变量与新变量相关联的变量变化函数。
最后,雅可比矩阵还用于对任意函数进行线性逼近

围绕一个点

:
