在此页面上,您将看到什么是正交矩阵以及它们与矩阵的逆矩阵的关系。您还将看到几个示例来完全理解它。此外,我们还教您检查任何正交矩阵的公式,通过该公式您将知道如何快速找到一个正交矩阵。最后,您将找到这些特定矩阵的属性和应用以及典型的已解决考试练习。
什么是正交矩阵?
正交矩阵的定义如下:
正交矩阵是一个实数方阵,乘以它的转置(或转置)等于单位矩阵。即满足以下条件:

金子

是一个正交矩阵并且

表示其转置矩阵。
为了满足这个条件,正交矩阵的列和行必须是正交单位向量,即它们必须形成正交基。因此,一些数学家也将它们称为正交矩阵。
正交矩阵的逆
另一种解释正交矩阵概念的方法是通过逆矩阵,因为正交矩阵的转置(或转置)矩阵等于其逆矩阵。
要充分理解该定理,了解如何反转矩阵非常重要。在此链接中,您将找到矩阵的逆矩阵及其所有属性的详细说明,甚至还有逐步解决的练习可供练习。
使用正交矩阵条件和逆矩阵的主要属性,可以轻松地证明正交矩阵的逆矩阵与其转置等效:
![\left.\begin{array}{c} A \cdot A^t =I \\[2ex] A \cdot A^{-1} = I\end{array} \right\} \longrightarrow \ A^t=A^{-1}](https://mathority.org/wp-content/ql-cache/quicklatex.com-36f7666e4730a6311c088c7e8d7f0f38_l3.png "Rendered by QuickLaTeX.com")
因此,正交矩阵将始终是可逆矩阵,或者换句话说,它将是正则或非简并矩阵。
接下来,我们将通过几个正交矩阵的例子来完成对一切概念的理解。
2×2 正交矩阵示例
下面的矩阵是一个维度为2×2的正交矩阵:
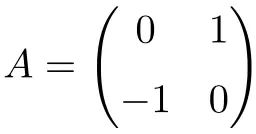
我们可以通过转置计算乘积来检查它是否正交:

![\displaystyle A\cdot A^t= \begin{pmatrix} 0 & 1 \\[1.1ex] -1 & 0 \end{pmatrix} \cdot \begin{pmatrix} 0 & -1 \\[1.1ex] 1 & 0 \end{pmatrix} = \begin{pmatrix} 1 & 0 \\[1.1ex] 0 & 1 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-f7baa091c2fd963507b93e6bec5c386b_l3.png "Rendered by QuickLaTeX.com")
由于结果给出了相同的矩阵,我们验证 A 是正交矩阵。
3×3 正交矩阵示例
下面的矩阵是一个维度为3×3的正交矩阵:
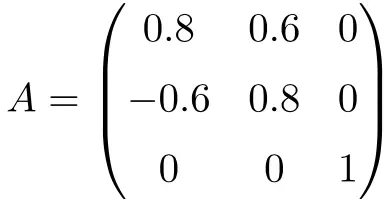
我们可以通过将矩阵 A 乘以其转置来证明它是正交的:
![\displaystyle A\cdot A^t = \begin{pmatrix}0.8&0.6&0\\[1.1ex] -0.6&0.8&0\\[1.1ex] 0&0&1\end{pmatrix}\cdot \begin{pmatrix}0.8&-0.6&0\\[1.1ex] 0.6&0.8&0\\[1.1ex] 0&0&1\end{pmatrix}= \begin{pmatrix} 1 & 0 & 0\\[1.1ex] 0 & 1 & 0 \\[1.1ex] 0&0&1\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-35687f56ff4ad5d1b19ea673b4ac85de_l3.png "Rendered by QuickLaTeX.com")
由于解是酉矩阵,因此我们证明 A 是正交矩阵。
求 2×2 正交矩阵的公式
然后我们将看到所有 2 阶正交矩阵都遵循相同模式的证明。
考虑大小为 2×2 的通用矩阵:
![\displaystyle A=\begin{pmatrix} a & b \\[1.1ex] c & d \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-ac19d6ab63d390a9340cbce4014b1136_l3.png "Rendered by QuickLaTeX.com")
为了使该矩阵正交,必须满足以下矩阵方程:

![\displaystyle \begin{pmatrix} a & b \\[1.1ex] c & d \end{pmatrix} \cdot \begin{pmatrix} a & c \\[1.1ex] b & d \end{pmatrix} =\begin{pmatrix} 1 & 0 \\[1.1ex] 0 & 1 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-1e108701513ef6f2118e3b7d32657cd8_l3.png "Rendered by QuickLaTeX.com")
求解矩阵乘法,我们得到以下方程:
![\displaystyle \begin{pmatrix} a^2+b^2 & ac+bd \\[1.1ex] ac+bd & c^2+d^2 \end{pmatrix}=\begin{pmatrix} 1 & 0 \\[1.1ex] 0 & 1 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-d5435c614cb0da442fe04f65aec89637_l3.png "Rendered by QuickLaTeX.com")
![\displaystyle \begin{array}{c}a^2+b^2=1 \\[2ex] ac+bd=0 \\[2ex] c^2+d^2=1 \end{array} \qquad \begin{array}{l} (1) \\[2ex] (2) \\[2ex] (3) \end{array}](https://mathority.org/wp-content/ql-cache/quicklatex.com-f8897132ecdbf389450e8c5fa1707226_l3.png "Rendered by QuickLaTeX.com")
如果仔细观察,这些等式看起来很像基本的毕达哥拉斯三角关系:

因此,得到满足式(1)和式(3)的项为:
![\displaystyle \begin{array}{l} a = \cos \theta \qquad \qquad \qquad c = \sin\phi \\[2ex] b = \sin \theta \qquad \qquad \qquad d = \cos \phi\end{array}](https://mathority.org/wp-content/ql-cache/quicklatex.com-9abeb023c5050d8d7f6fbab8c52227ba_l3.png "Rendered by QuickLaTeX.com")
另外,将这些值代入第二个方程,我们得到两个角度之间的关系:



即必须满足以下两个条件之一:


因此,总而言之,正交矩阵必须具有以下两个矩阵之一的结构:
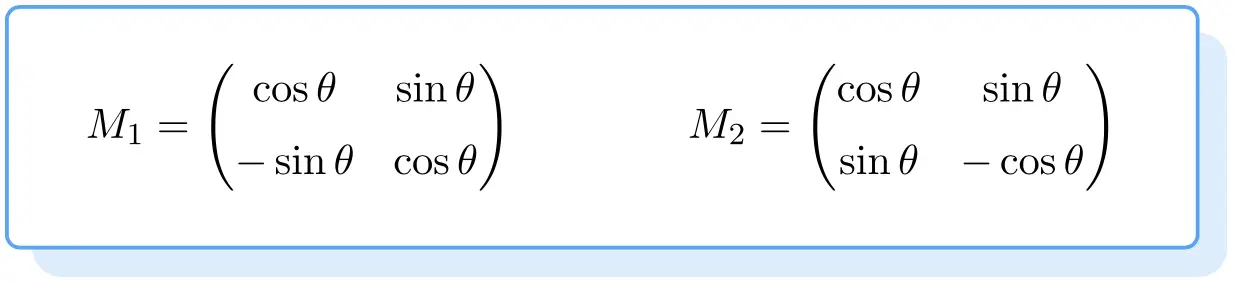
金子

是一个实数。
事实上,如果作为一个例子我们授予价值

采用第一种结构,我们将得到在“2×2正交矩阵示例”一节中验证为正交的矩阵:
![\displaystyle M_1 \left(\theta =\frac{\pi}{2}\right)=\begin{pmatrix} \cos \cfrac{\pi}{2} &\sin \cfrac{\pi}{2} \\[4ex] -\sin \cfrac{\pi}{2} & \cos \cfrac{\pi}{2} \end{pmatrix}=\begin{pmatrix} \vphantom{\frac{\pi}{2}}0 &1 \\[2ex]\vphantom{\frac{\pi}{2}} -1 & 0 \end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-1a331cab64745933f7c8a5009c799be6_l3.png "Rendered by QuickLaTeX.com")
正交矩阵属性
此类矩阵的特点是:
- 正交矩阵永远不可能是奇异矩阵,因为它总是可以逆的。从这个意义上说,正交矩阵的逆是另一个正交矩阵。
- 任何正交矩阵都可以对角化。然后我们说正交矩阵是可正交对角化的。
- 正交矩阵的所有特征值或特征值的模数都等于 1。
- 任何仅由实数组成的正交矩阵也是正规矩阵。
- 复数环境中正交矩阵的类似物是酉矩阵。
- 显然,单位矩阵是一个正交矩阵。
- 维度为 n × n 的正交矩阵的集合以及矩阵乘积的运算形成一个称为正交群的群。也就是说,两个正交矩阵的乘积等于另一个正交矩阵。
- 此外,正交矩阵与其转置相乘的结果可以用 Kronecker delta 表示:
![\displaystyle (A\cdot A^{t})_{ij} = \delta_{ij}=\begin{cases}1 & \mbox{si }i = j, \\[2ex] 0 & \mbox{si }i \ne j\end{cases}](https://mathority.org/wp-content/ql-cache/quicklatex.com-7d0922008f857f33f46de7551a8ff7cc_l3.png "Rendered by QuickLaTeX.com")
- 最后,正交矩阵的行列式总是+1或-1。

正交矩阵的求解练习
然后我们将解决正交矩阵的练习。
- 给定以下 3 阶方阵,找到 的值

和

使其正交:
![\displaystyle A=\frac{1}{3}\begin{pmatrix}a&a&1\\[1.1ex] b&1&b\\[1.1ex] 1&a&a\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-892ca58ec5cd36060396cb566902d65d_l3.png "Rendered by QuickLaTeX.com")
为了满足矩阵的正交性,矩阵与其转置的乘积必须等于单位矩阵。所以:

![\displaystyle \frac{1}{3}\begin{pmatrix}a&a&1\\[1.1ex] b&1&b\\[1.1ex] 1&a&a\end{pmatrix} \cdot \frac{1}{3}\begin{pmatrix}a&b&1\\[1.1ex] a&1&a\\[1.1ex] 1&b&a\end{pmatrix}=\begin{pmatrix}1&0&0\\[1.1ex] 0&1&0\\[1.1ex] 0&0&1\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-c2dc9ef8c514302f183ca66626cabc1b_l3.png "Rendered by QuickLaTeX.com")
我们将矩阵相乘:
![\displaystyle \frac{1}{9}\begin{pmatrix}2a^2+1&ab+a+b&2a+a^2\\[1.5ex] ab+a+b&2b^2+1&b+a+ab\\[1.5ex] 2a+a^2&b+a+ab&1+2a^2\end{pmatrix} =\begin{pmatrix}1&0&0\\[1.5ex] 0&1&0\\[1.5ex] 0&0&1\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-18a21a22f3cc9747c310d271c3fe4c5c_l3.png "Rendered by QuickLaTeX.com")
现在我们可以从矩阵的左上角得到一个方程,因为该位置的元素必须匹配。然而:

我们求解方程并消除未知数:




然而,有些方程的正解不成立,例如右上角的方程。所以只有否定的解决方案是可能的。
另一方面,计算变量
例如,我们可以匹配位于第一列第二行的术语:


通过替换的值
在等式中:



简而言之,唯一可能的解决方案是:

所以这些值对应的正交矩阵是:
![\displaystyle A=\frac{1}{3}\begin{pmatrix}-2&-2&1\\[1.1ex] -2&1&-2\\[1.1ex] 1&-2&-2\end{pmatrix}](https://mathority.org/wp-content/ql-cache/quicklatex.com-cb7e7a27658da85f7b0d16b17f1f0815_l3.png "Rendered by QuickLaTeX.com")
正交矩阵的应用
尽管看起来可能不像,因为它们通常具有非常简单的形式,但正交矩阵在数学中非常重要,尤其是在线性代数领域。
在几何中,正交矩阵表示实向量空间中的等距变换(不改变距离和角度),这就是它们被称为正交变换的原因。此外,这些变换是所考虑的向量空间的内部同构。这些变换可以是旋转、镜面反射或反转。
最后,这种类型的矩阵也用于物理学,因为它允许研究刚体的运动。它们甚至被用于某些场论的表述。